АВТОНОМНАЯ РОБОТОТЕХНИКА
Внедрение робототехники на рынке труда стало реальностью во многих отраслях промышленности. Роботы представляют собой оборудование, снабженное большим количеством манипуляторов и чипами радиообнаружения, которые позволяют им выбирать инструменты.
МЫ ПРИНИМАЕМ ВЫЗОВ
С развитием искусственного интеллекта роботизация становится серьезным объектом для обсуждения в ближайшем будущем. Каковы цели и задачи роботов относительно антикоррозионного покрытия, в частности, обработки поверхности объектов крупных размеров?

Ограничивающиеусловияработысотрудников: трудностьдоступакобъекту, тяжестьтруда, безопасность, риск для здоровья. Существует множество доводов в пользу роботизации в области обработки поверхности объектов крупных размеров. Роботизация все еще довольно слабо развита: однако, существует рынок, который нуждается в строительстве и ремонте судов, портовых сооружениях, разработке месторождений нефти и газа в открытом море, а также в получении возобновляемой энергии с помощью ветровых турбин.
Факторы, ограничивающиеработу: непросто обеспечить обработку поверхности, к примеру, ветровой турбины, работая на тросе, на высоте более 20 метров над морем.
РАБОЧИХ МЕСТ, СВЯЗАННЫХ С ВНЕДРЕНИЕМ РОБОТИЗАЦИИ В АВТОМОБИЛЬНОЙ ПРОМЫШЛЕННОСТИ В США
НЕСЧАСТНЫХ СЛУЧАЕВ СО СМЕРТЕЛЬНЫМ ИСХОДОМ В ГОД
ПО ПРИЧИНЕ ВОЗДЕЙСТВИЯ РОБОТОВ
Ожидается, что роботизация получит распространение, как и использование дронов. Возможны разные способы эксплуатации роботов: для контроля/проверки поверхности, а также для нанесения покрытия. Некоторые примеры: на сегодняшний день, количественное определение дефектов на корпусе осуществляется специалистами вручную, что вызывает разные проблемы (трудность в точных расчетах, возможные конфликты в связи с обработкой результатов). Теперь с помощью 3D-сканеров в статических системах можно проводить исчерпывающую съемку даже ночью и в сложных погодных условиях.
Чтокасаетсянанесенияпокрытия, пескоструйнаяобработканамостувСиднее(США) былапроведенамобильнымавтономнымроботом. Робот CROC также является предметом исследовательской программы в Университете технологий Сиднея: CROC, робот, оснащенный двумя магнитными ножками, 3D-датчиком и камерой высокого разрешения, который на основе собранной информации создает 3D-план структуры и может перемещаться внутри сложной неизвестной конструкции.Мы не останавливаемся на достигнутом прогрессе, и, несомненно, нам скоро придется полагаться на дронов и роботов, не говоря уже об искусственном интеллекте
БОЛЬШЕ ФАКТОВ
для нашей компании нет слишком больших объектов и мостов
ПРОМЫШЛЕННЫХ РОБОТОВ В 2018
ДЕЙСТВУЮЩИХ РОБОТОВ ПО ВСЕМУ МИРУ
%
КУПЛЕННЫХ РОБОТОВ В 5 СТРАНАХ
%
АВТОМАТИЗИРОВАННЫХ РАБОЧИХ МЕСТ В 2099
НЕСКОЛЬКО ЗАМЕТОК О РОБОТОТЕХНИКЕ
История :
1947 : Первый дистанционно управляемый электромеханический манипулятор.
1954 : Первый программируемый робот
1961 : Использование промышленного робота, созданного компанией «Юнимэйшн» (США) на сборочной линии автомобильной корпорации «General Motors».
1961 : Первый робот с программным управлением.
1963 : Использование наблюдения для управления роботом.
-
Манипуляторы:
– Осуществление движения по заданной траектории в пространстве,
– Дискретные значения положений (2 или3),
-Управление является последовательным.
-
Автоманипуляторы, устройства дистанционного управления.
Автоманипуляторы, устройства дистанционного управления
-
экскаватор, мостовойкран, возникшиек1945 г. вСША :
– Осуществление движения по заданной траектории в пространстве,
-Траектории определяются оператором мгновенно, обычно с панели управления (джойстик).
Роботы: промышленные, обучающие, автономные мобильные роботы.

Автономныемобильныероботы:
возможностироботаширепопричинеегоподвижности. В частности, его можно использовать в опасных (ядерная, пожарная, гражданская безопасность, разминирование) и недоступных зонах (океанография, космос). Такие роботы используют датчики и имеют сложное программное обеспечение.
Можно выделить 2 типа передвижения робота: шагающие роботы, которые имитируют человеческую походку и мобильные роботы, которые больше напоминают транспортное средство.
Обучающие роботы, которые представляют собой ограниченную версию предыдущих роботов. Технологияданного робота отличается от технологии роботов-строителей. Они имеют образовательную и обучающую функции, также могут быть использованы для проверки технологичности конструкции роботизированной станции.

Промышленные роботы-манипуляторы представляют собой:
Запчасти: Складирование– расскладирование,
Паллетирование– депаллетирование,
Погрузочно-разгрузочные работы
Обработка испытательных образцов,
Сборка запчастей, …
Инструменты: Непрерывная или точечная сварка,
Oкраска,
Проклейка,
Обрезкавыпрессовок, …
Промышленный робот-манипулятор
Характеристики
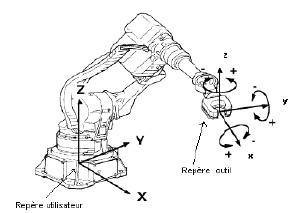
Перемещение инструмента: Евклидово пространство в декартовой системе координат.
Схема инструмента, транспортного средства и декартовая система координат
Евклидово пространство:
• Механические формы
• 3 оси для декартовой системы координат в пространстве
• 3 дополнительные оси для перемещения линии инструмента
• Механика твердого тела.
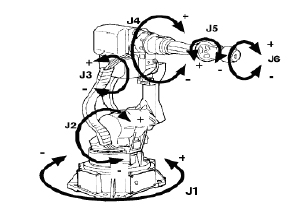
Примечание: Манипулятор с шестью осями вращения и многофункциональным захватом.
Повторение траектории.
Отклонение +/- 1 мин для кривой в пространстве цилиндрической формы.
Механическая рука Шкаф управления Блок контроля.
Блок контроля: электронное оборудование системы управления, сервоуправление, регулятор скорости и специализированная программа для робота.
Автоматика для повторного запуска и управления программой (преобразователь декартовой системы координат в угловые координаты для работы двигателя).
Матричное исчисление координат точек для отправки их на двигатели в режиме реального времени.
Расположение робота относительно объекта точно задано в начале повторения цикла.
Вес инструмента от нескольких кг до нескольких сотен кг.
Вес робота от нескольких кг до нескольких тон.
Весь процесс производства автомобилей роботизирован: антикоррозийная обработка, окраска, сборка.
Промышленная робототехника
Железнодорожный локомотив
Ограничения:
Мелкосерийное, нонештучное производство Caterpillar,
Максимальная высота от 30 до 100м,
Программирование тысяч точек координат,
Время выполнения программы от 40 до 50 мин на один поезд,
Мобильная робототехника
Промышленная робототехника

Мобильная робототехника
10 тыс. роботоввгод

Сверлильный робот
2017

Сверлильный робот
Роботы-черепахи Грея Уолтера в 50- егг. ХХ века
Один из первых автономных мобильных роботов
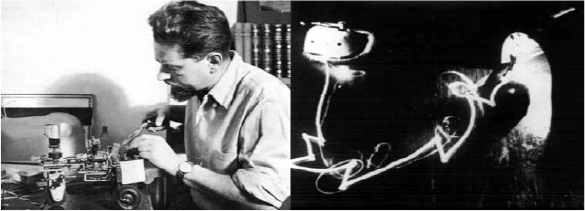
Черепаха, созданная Греем Уолтером в 50-е годы ХХ века, является одним из первых автономных мобильных роботов. Грей Уолтер использовал только несколько аналоговых микросхем, в том числе его робот мог двигаться на свет, обходя препятствия и добираться до источников подзарядки аккумуляторных батарей. Эти функции могли осуществляться только в полностью подготовленной среде, но они являлись лишь базовыми функциями, которые подлежат технологическим исследованиям и разработке с целью сделать их более продвинутыми.
1969 г.: Стэнфордский университет и робот Шеки
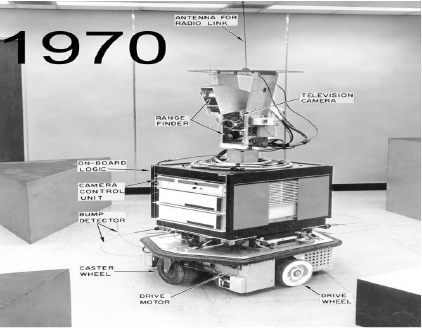
Первые связи между исследованиями в области искусственного интеллекта и робототехники появились в Стэндфорде в 1969 г. с созданием робота Шеки. Этот робот использовал ультразвуковые дальномеры и камеру и служил платформой для исследований в области искусственного интеллекта, и в то время в основном работал над «символическим» представлением задач. Восприятие окружающей среды, которое в то время рассматривалось как отдельная или даже вторичная проблема, оказывается особенно сложной и также приводит к сильным ограничениям во взаимодействии с окружающей средой.
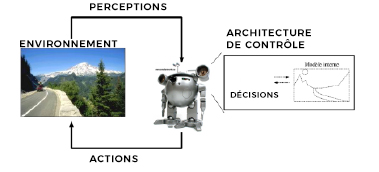
Наши дни

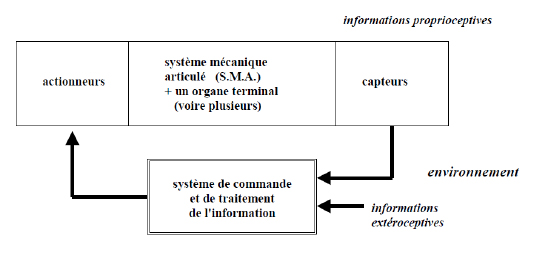
Схема взаимодействия робота с окружающей средой, который имеет или не имеет внутренней модели внешней среды.
Данный взгляд на робототехнику ориентирован на искусственный интеллект, который расположен в центре цепочки данного цикла Восприятие / Решение/ Действия.
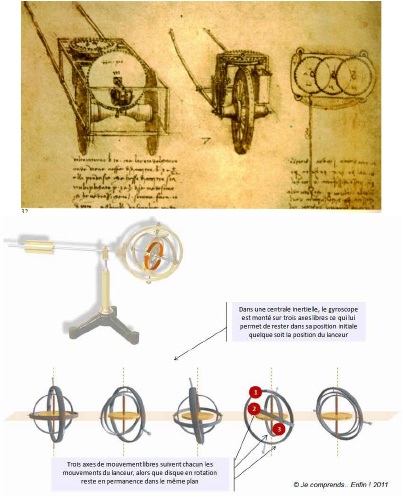
Проприоцептивные датчики: одометр, вращающийся трансформатор, блок инерциальных датчиков
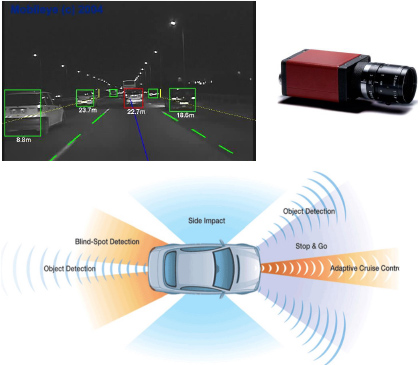
Цель: изучить окружающую среду транспортного средства.
Датчикидлячего?
Обнаружение, распознавание препятствий.
Обнаружение/ распознавание: пешеходы, транспортные средства, уязвимости.
Дальномерный и радиолокационный датчики подходят для определения, но не для распознавания.
Очень перспективные методыкак для визуального обнаружения, так и для визуального распознавания / классификации
Все датчики, используемые в мобильной робототехнике предоставляют информацию, принадлежащую к двумкатегориям:
– Проприоцептивная информация: информация, содержащаяся внутри робота о его передвижениях в пространстве. Вращение колес, увеличение скорости.
- Расположениеробота в пространстве.
Недостаток: точность ухудшается со временем, но не зависит от окружающей среды.
– Экстероцептивная информация или восприятие: информация о расположении, которое робот может принимать в окружающем пространстве.
- Расположение робота в пространстве.
Недостаток: изменчивость и неоднозначность восприятия, но допускающая привязку к окружающей среде.
Решение: Объединение двух типов информации.
Проприоцептивная информация проста в использовании, но с течением времени смещается, восприятия не возникают. В то же время информация страдает от проблем изменчивости и неоднозначности. Решением этих проблем является объединение этих двух типов информации.
Датчики восприятия
Экстероцептивные датчики: камера, дальнометр, радар
– Экстероцептивная информация или восприятие: информация о расположении, которое робот принимает в окружающем пространстве. Камера, дальнометр, радар.
Расположение робота в пространстве
Недостаток: изменчивость и неоднозначность восприятия, но допускающая привязку к окружающей среде.
Решение: Объединение двух типов информации.
Действия: перемещение, не голономные мобильные базы.
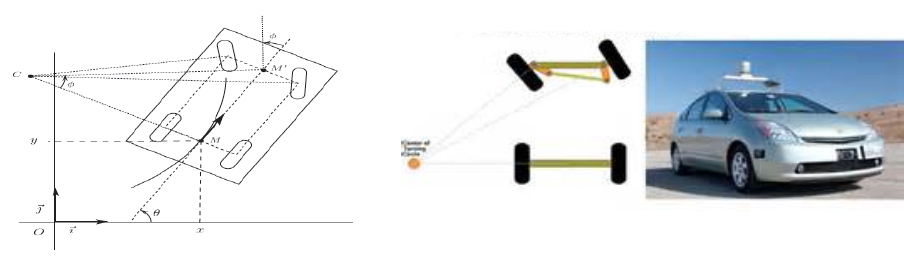
Неголономная платформа: автомобиль с гораздо меньшим количеством свободных осей. Действия: перемещение, мобильные базы.
Действия: перемещение, мобильные базы.
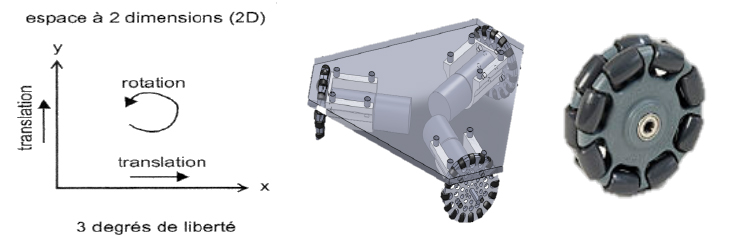
Голономный робот способен двигаться в любом направлении независимо от его ориентации.
Голономный робот способен перемещаться в любом направлении. Действия: 6-осный манипулятор.

Одновременная локализация и картирование.
Одновременная локализация и картирование
Она позволяет одновременно:
– строить и/или улучшать карту его окружающего пространства,
– локализоваться.
Одновременная локализация и картирование может быть описана с помощью двухвопросов:
– На что похоже мое окружение? Картирование представляет собой образ окружающего пространства и толкование данных, полученных от датчиков.
– Где я?Локализация – это проблема оценки местоположения робота относительно плоскости.
Одновременная локализация и картирование, известная в английском языке под названием SLAM (Simultaneous Localization And Mapping) или CML (Concurrent Mappingand Localization) помогает роботу или транспортному средству одновременно построить или улучшить карту окружающего пространства, а также локализоваться.
Одновременная локализация и картирование может быть описана с помощью двухвопросов:
– На что похожа мое окружение? Картирование представляет собой образ окружающего пространства и толкование данных, полученных от датчиков.
– Где я?Локализация – это проблема оценки местоположения робота относительно плоскости.
Таким образом, одновременная локализация и картирование представляет собой задачу построения карты и локализации робота в пространстве.
На практике эти две проблемы не могу тбыть решены независимо друготдруга. Перед тем, как построить качественную карту своего окружения на основе набора наблюдений, роботу необходимо знать, из каких мест эти наблюдения были сделаны.