Le monde de la robotique
Leur intégration dans le monde du travail constitue déjà une réalité, dans différentes industries, sous forme de machine-outil équipée de plusieurs bras et de puces de radiodétection qui lui permettent de choisir ses outils.
Nous relevons tous les defis

L’aspect contraignant du travail pour les salariés (capacité d’accès, pénibilité, sécurité, santé…). Autant d’éléments qui plaident pour la robotisation concernant le traitement de surface sur des structures de grandes dimensions, robotisation encore assez peu développée : il existe pourtant bien un marché, que l’on pense à la construction et la réparation navale, les structures portuaires, l’exploitation du pétrole et du gaz en haute mer ou encore les énergies maritimes, avec notamment les champs éoliens.
Et concernant l’aspect contraignant du travail, ces chantiers répondent aussi à ce critère :
pas simple d’assurer le traitement de surface suspendu à une corde à plus de 20 mètres des flots pour une éolienne en mer par exemple…
emplois issus de la robotisation dans le secteur auto aux US
accidents mortels par an
causé par les robots
La robotisation est donc appelée à gagner du terrain, tout comme l’utilisation des drones. Différentes exploitations des robots sont possibles : pour le contrôle/ inspection de la surface, et également pour l’application. Quelques exemples parmi d’autres : alors qu’aujourd’hui, la quantification des défauts sur une carène est faite manuellement par des experts, ce qui pose différents problèmes (difficulté de quantifier de façon précise, conflits toujours possibles sur l’interprétation des résultats), il est désormais possible via des scanners 3D, sur des systèmes statiques, d’assurer un relevé exhaustif, même de nuit et dans de mauvaises conditions climatiques.
Pour ce qui est de l’application, la projection d’abrasif pour le pont de Sidney (USA) a été réalisée par un robot mobile autonome. A l’université Technologique de Sydney (UTS), CROC fait d’ailleurs l’objet d’un programme de recherche : CROC, soit un robot équipé de deux pieds magnétiques, équipé d’un capteur 3D et d’une caméra haute-définition, qui à partir des informations recueillies crée un plan 3D de la structure et est en mesure de se déplacer au sein d’une structure complexe inconnue. On n’arrête pas le progrès, et nul doute qu’il faudra bientôt compter avec les drones et les robots sans parler de l’intelligence artificiel.
Plus qu’un metier…
aucunes grandes structures ou ponts ne sont trop grands pour nous.
Robots industriels en 2018
robots opèrent dans le monde
%
des robots achètes dans 5 pays
%
de nos emplois automatisés en 2099
Quelques notions de robotiques
Historique :
1947 : Premier manipulateur électrique télé opéré.
1954 : Premier robot programmable.
1961 : Utilisation d’un robot industriel, commercialisé par la société UNIMATION (USA), sur
une chaîne de montage de General Motors.
1961 : Premier robot avec contrôle en effort.
1963 : Utilisation de la vision pour commander un robot
-
Les manipulateurs:
– Les trajectoires sont non quelconques dans l’espace,
– Les positions sont discrètes avec 2 ou 3 valeurs par axe,
– La commande est séquentielle.
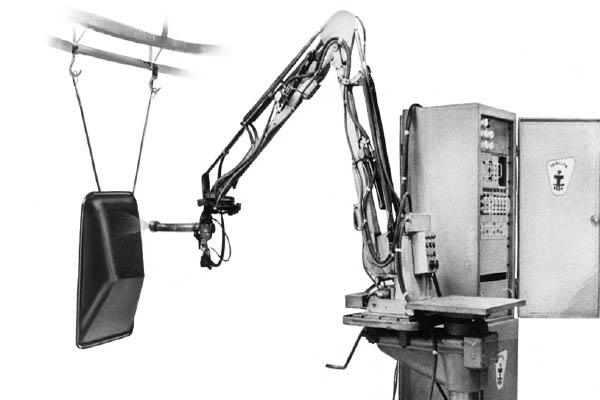
Les télémanipulateurs, appareils de manipulation à distance
-
Les télémanipulateurs, appareils de manipulation à distance (pelle mécanique, pont roulant), apparus vers 1945 aux USA :
– Les trajectoires peuvent être quelconques dans l’espace,
– Les trajectoires sont définies de manière instantanée par l’opérateur,généralementà partir d’un pupitre de commande (joystick).
Les robots: manipulateurs industriels, didactiques, mobiles autonomes

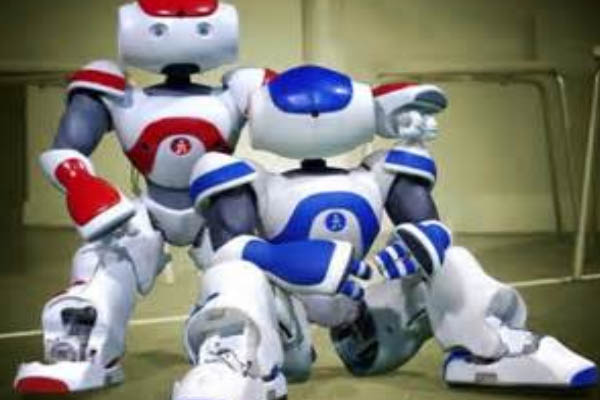
Les robots mobiles autonomes : Les possibilités sont plus vastes, du fait de leur mobilité.
Notamment, ils peuvent être utilisés en zone dangereuse (nucléaire, incendie, sécurité civile, déminage), inaccessible (océanographie, spatial). De tels robots font appel à des capteurs et à des logiciels sophistiqués.
On peut distinguer 2 types de locomotion : Les robots marcheurs qui imitent la démarche humaine, et les robots mobiles qui ressemblent plus à des véhicules.
Les robots didactiques, qui sont des versions au format réduit des précédents robots.
La technologie est différente, de même que les constructeurs. Ils ont un rôle de formation et d’enseignement, ils peuvent aussi être utilisés pour effectuer des tests de faisabilité d’un poste robotisé.

Les robots manipulateurs industriels, chargés de manipuler, soient :
Des pièces : Stockage – déstockage,
Palettisation – dépalettisation,
Chargement – déchargement de machine outil,
Manipulation d’éprouvettes,
Assemblage de pièces, …
Des outils : Soudure en continu ou par points,
Peinture,
Collage,
Ebavurage, …
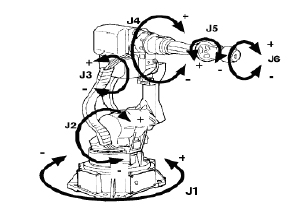
Le robot manipulateur industriel
Les caractéristiques
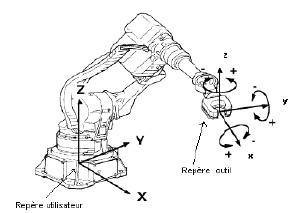
Le déplacement d’une ligne outil : Un système Euclidien dans un repère Cartésien
Schéma de l’outil, le véhicule et un repère cartésien
Système Euclidien : • Les formes mécaniques • 3 axes pour un repère cartésiens dans l’espace • 3 axes supplémentaires pour déplacer une ligne outil • Mécanique du Solide
Nota : Un bras humaine à 6 axes de rotation et un préhenseur multifonction la main.
Répétabilité de la trajectoire
Répétabilité de +/- 1mn sphère cylindre et courbe
Bras mécanique Armoire de commande Unité de contrôle
Unité de contrôle : électronique de commande, asservissement, variateur de vitesse et programme spécialisé du robot.
Un automate pour piloter le programme de façon répétitive (transformateur de coordonnées Cartésienne en cordonnées angulaires par le moteur)
Calcul matriciel en temps réel de coordonnées de points à envoyer aux moteurs
Mécanique positionner de façon précise et de façon répétitive entre l’objet et le robot.
Le poids de l’outil de quelques kg à plusieurs centaines de Kg.
Poids du robot de quelques centaines de kg à plusieurs tonnes.
L’intégralité du processus de fabrication des voitures est robotisée : Ferrage, Peinture, assemblages
Le robotique industrielle
Train
Les limites :
- Petites Séries mais pas unitaire Caterpillar
- Taille maxi entre 30 à 100m
- Programmation de milliers de points
- 16 000 pour un train de 32
- Temps du programme 40 à 50 mn par train
Le robotique mobile
La robotique industriel
120 000 robots/an

La robotique mobile
10 000 robots/an

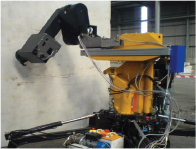
Robot perceur
2017

Robot perceur
La Tortue de Grey Walter dans les années 1950
L’un des premiers robots mobile autonome
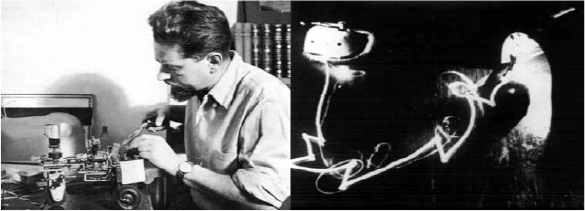
La Tortue construite par Grey Walter dans les année 1950, est l’un des premiers robots mobiles autonomes. Grey Walter n’utilise que quelques composants analogiques, dont des tubes à vide, mais son robot est capable de se diriger vers une lumière qui marque un but, de s’arrêter face à des obstacles et de recharger ses batteries lorsqu’il arrive dans sa niche. Toutes ces fonctions sont réalisées dans un environnement entièrement préparé, mais restent des fonctions de base qui sont toujours des sujets de recherche et de développement technologiques pour les rendre de plus en plus génériques et robustes.
1969 : Université de Stanford avec Shakey
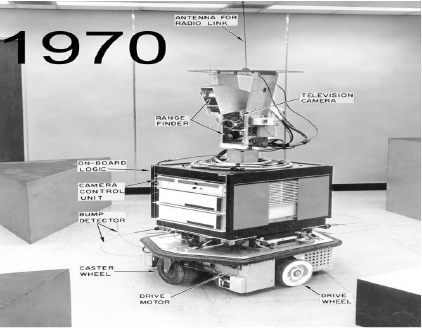
Les premier liens entre la recherche en intelligence artificielle et la robotique apparaissentàStanforden 1969 avec Shakey.
Ce robot utilise des télémètres à ultrason et une caméra et sert de plate-forme pour la recherche en intelligence artificielle, qui à l’époque travaille essentiellement sur des approches symboliques de la planification. La perception de l’environnement, qui à l’époque est considérée comme un problème séparé, voire secondaire, se révèle particulièrement complexe et conduit là aussi à de fortes contraintes sur l’environnement.
De nos jours

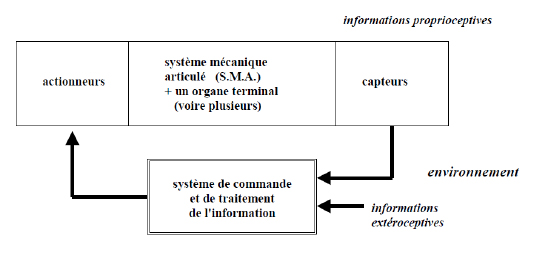
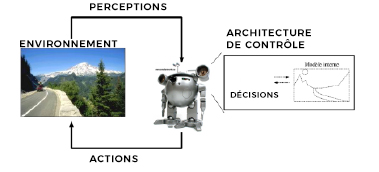
Schéma des interactions d’un robot avec son environnement. Avec ou sans modèle interne.
Cette vision de la robotique est très orienté intelligence artificielle qui place au centre des préoccupations l’enchainement de ce cycle
Perceptions / Décision / actions.
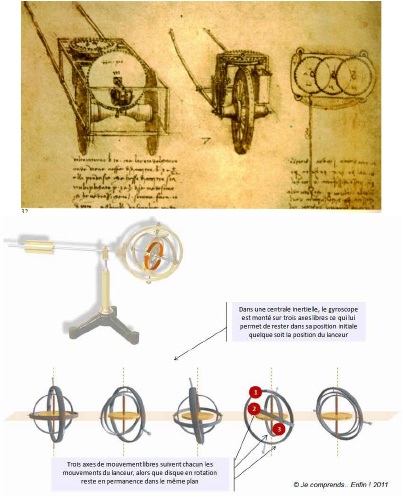
Les capteurs proprioceptifs : un odomètre, un résolveur, une centrale inertielle
But : comprendre l’environnement autour du véhicule
Tout bouge !
Capteurs pour faire quoi ?
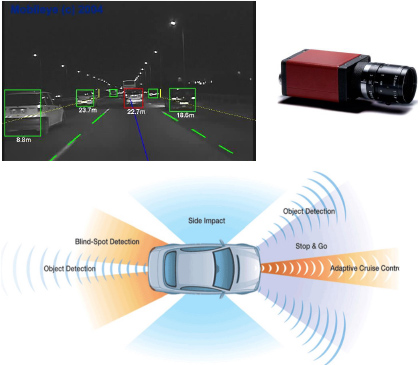
Détection, reconnaissance des obstacles
Détection / reconnaissance : piétons, véhicules, vulnérables…
Approches télémétriques et radar bien adaptées pour la détection, mais pas pour la reconnaissance
Approches visuelles très prometteuses tant pour la détection que pour la reconnaissance / classification
Tous les capteurs utilisées en robotique mobile fournissent des informations appartenant à 2 grandes catégories.:
* Déplacementdu robot dans l’espace.
Inconvénient : la précision se dégrade dans le temps mais ne dépend pas de l’environnement
* Positiondu robot dans l’espace.
Inconvénient : la variabilité perceptuel et ambiguïté des perceptions mais permet un ancrage dans l’environnement
Solution : La fusion de ces 2 types informations.
Les informations proprioceptives sont simples à utiliser mais dérivent au cours du temps, les perceptions ne dérivent pas mais souffrent des problèmes de variabilité perceptuel et ambiguïté. La solution pour résoudre ces problèmes est la fusion de ces deux types informations.
Les capteurs de perception
Les capteurs extéroceptives : camera, télémètre, radar
* Positiondu robot dans l’espace.
Inconvénient : la variabilité perceptuel et ambiguïté des perceptions mais permet un ancrage dans l’environnement.
,
Actions : se déplacer, Les bases mobiles : non holonome
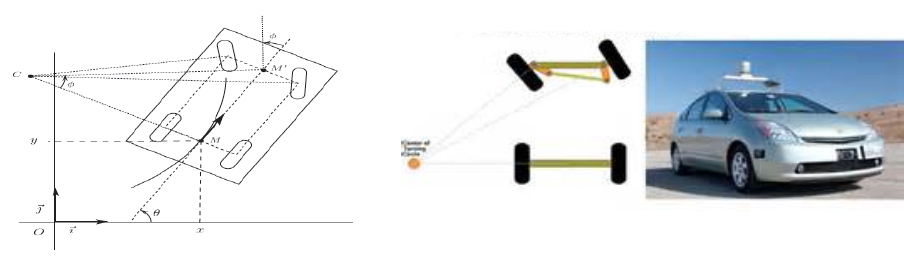
Une plateforme non holonome : une voiture avec beaucoup moins d’axes de liberté.
Actions : se déplacer, les bases mobiles
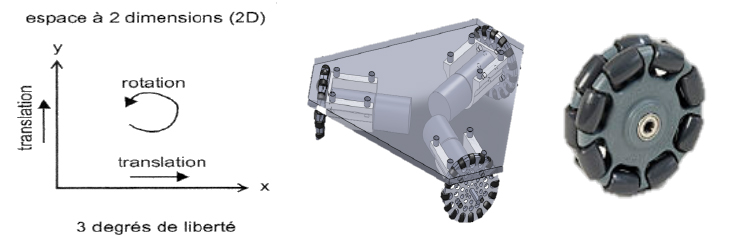
Un robot holonome est capable de se déplacer dans n’importe quel direction quel que soit son orientation
Actions : le manipulateur 6 axes libertés

La Cartographie et localisation simultanées
SLAM (Simultaneous Localization And Mapping)
Il permet simultanément de :
– construire et/ou améliorer une carte de son environnement,
–se localiser.
Le SLAM peut être décrit par deux questions :
– A quoi ressemble mon environnement ? La cartographie est la représentation de l’environnement et l’interprétation des données fournis par les capteurs.
– Ou suis-je ? La localisation est le problème de l’estimation de l’emplacement du robot par rapport à un plan.
La Cartographie et Localisation Simultanées, connue en anglais sous le nom de SLAM(SimultaneousLocalizationAnd Mapping) ou CML(ConcurrentMappingand Localization), consiste, pour un robotouvéhicule autonome, à simultanément construire ou améliorer une carte de son environnement et de s’y localiser.
La plupart des robots industriels sont fixes et effectuent des tâches dans un environnement connu. En revanche, beaucoup de robots pour des applications non manufacturières doivent être en mesure de se déplacer par leurs propres moyens dans un environnement inconnu.
Le SLAM peut être décrit par deux questions :
– Àquoi ressemble mon environnement ? » La cartographie est la représentation de l’environnement et l’interprétation des données fournis par les capteurs dans une représentation données.
– Où suis-je ? » La localisation est le problème de l’estimation de l’emplacement du robot par rapport à un plan.
Le SLAM est donc définie comme le problème de la construction d’une carte en même temps que la localisation du robot dans ce plan.
Dans la pratique, ces deux problèmes ne peuvent être résolus de manière indépendante.Avantde pouvoir construire une carte de qualité de son environnement à partir d’un ensemble d’observations, unrobota besoin de savoir à partir de quels endroits ces observations ont été faites. Dans lemêmetemps, il est difficile d’estimer la position actuelle d’un véhicule sans carte. Le SLAM est souvent considéré comme le paradoxe de la poule et de l’œuf : une carte est nécessaire pour définir la localisation, la localisation est nécessaire pour construire une carte.
Le SLAM est une aptitude humaine quotidienne, c’est une fonctionnalité importante des robots intelligents.